Training of DnCNN for Denoising¶
This example demonstrates the training and application of the DnCNN model from [64] to denoise images that have been corrupted with additive Gaussian noise.
[1]:
# isort: off
import os
from time import time
import numpy as np
# Set an arbitrary processor count (only applies if GPU is not available).
os.environ["XLA_FLAGS"] = "--xla_force_host_platform_device_count=8"
import jax
try:
from jax.extend.backend import get_backend # introduced in jax 0.4.33
except ImportError:
from jax.lib.xla_bridge import get_backend
from mpl_toolkits.axes_grid1 import make_axes_locatable
from scico import flax as sflax
from scico import metric, plot
from scico.flax.examples import load_image_data
plot.config_notebook_plotting()
platform = get_backend().platform
print("Platform: ", platform)
Platform: gpu
Read data from cache or generate if not available.
[2]:
size = 40 # patch size
train_nimg = 400 # number of training images
test_nimg = 16 # number of testing images
nimg = train_nimg + test_nimg
gray = True # use gray scale images
data_mode = "dn" # Denoising problem
noise_level = 0.1 # Standard deviation of noise
noise_range = False # Use fixed noise level
stride = 23 # Stride to sample multiple patches from each image
train_ds, test_ds = load_image_data(
train_nimg,
test_nimg,
size,
gray,
data_mode,
verbose=True,
noise_level=noise_level,
noise_range=noise_range,
stride=stride,
)
Downloading BSR_bsds500.tgz from https://www2.eecs.berkeley.edu/Research/Projects/CS/vision/grouping/BSR/
Download complete
Extracting content from tar file BSR_bsds500.tgz
Read 400 images for training
Read 100 images for testing
Saving as ~/.cache/scico/examples/data/BSDS/bsds500.npz
Storing data in path: ~/.cache/scico/examples/data
Set --training-- size: 104000
Set --testing -- size: 4160
Data range -- images -- Min: 0.00 Max: 1.00
Data range -- labels -- Min: 0.00 Max: 1.00
Define configuration dictionary for model and training loop.
Parameters have been selected for demonstration purposes and relatively short training. The depth of the model has been reduced to 6, instead of the 17 of the original model. The suggested settings can be found in the original paper.
[3]:
# model configuration
model_conf = {
"depth": 6,
"num_filters": 64,
}
# training configuration
train_conf: sflax.ConfigDict = {
"seed": 0,
"opt_type": "ADAM",
"batch_size": 128,
"num_epochs": 50,
"base_learning_rate": 1e-3,
"warmup_epochs": 0,
"log_every_steps": 5000,
"log": True,
"checkpointing": True,
}
Construct DnCNN model.
[4]:
channels = train_ds["image"].shape[-1]
model = sflax.DnCNNNet(
depth=model_conf["depth"],
channels=channels,
num_filters=model_conf["num_filters"],
)
Run training loop.
[5]:
workdir = os.path.join(os.path.expanduser("~"), ".cache", "scico", "examples", "dncnn_out")
train_conf["workdir"] = workdir
print(f"\nJAX local devices: {jax.local_devices()}\n")
trainer = sflax.BasicFlaxTrainer(
train_conf,
model,
train_ds,
test_ds,
)
modvar, stats_object = trainer.train()
JAX local devices: [CudaDevice(id=0), CudaDevice(id=1), CudaDevice(id=2), CudaDevice(id=3), CudaDevice(id=4), CudaDevice(id=5), CudaDevice(id=6), CudaDevice(id=7)]
channels: 1 training signals: 104000 testing signals: 4160 signal size: 40
Network Structure:
+---------------------------------+----------------+--------+-----------+--------+
| Name | Shape | Size | Mean | Std |
+---------------------------------+----------------+--------+-----------+--------+
| ConvBNBlock_0/BatchNorm_0/bias | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_0/BatchNorm_0/scale | (64,) | 64 | 1.0 | 0.0 |
| ConvBNBlock_0/Conv_0/kernel | (3, 3, 64, 64) | 36,864 | -0.000522 | 0.0589 |
| ConvBNBlock_1/BatchNorm_0/bias | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_1/BatchNorm_0/scale | (64,) | 64 | 1.0 | 0.0 |
| ConvBNBlock_1/Conv_0/kernel | (3, 3, 64, 64) | 36,864 | 0.000178 | 0.0589 |
| ConvBNBlock_2/BatchNorm_0/bias | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_2/BatchNorm_0/scale | (64,) | 64 | 1.0 | 0.0 |
| ConvBNBlock_2/Conv_0/kernel | (3, 3, 64, 64) | 36,864 | 5.46e-05 | 0.0588 |
| ConvBNBlock_3/BatchNorm_0/bias | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_3/BatchNorm_0/scale | (64,) | 64 | 1.0 | 0.0 |
| ConvBNBlock_3/Conv_0/kernel | (3, 3, 64, 64) | 36,864 | -9.56e-05 | 0.0592 |
| conv_end/kernel | (3, 3, 64, 1) | 576 | -0.00121 | 0.0605 |
| conv_start/kernel | (3, 3, 1, 64) | 576 | 0.0155 | 0.457 |
+---------------------------------+----------------+--------+-----------+--------+
Total weights: 149,120
Batch Normalization:
+--------------------------------+-------+------+------+-----+
| Name | Shape | Size | Mean | Std |
+--------------------------------+-------+------+------+-----+
| ConvBNBlock_0/BatchNorm_0/mean | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_0/BatchNorm_0/var | (64,) | 64 | 1.0 | 0.0 |
| ConvBNBlock_1/BatchNorm_0/mean | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_1/BatchNorm_0/var | (64,) | 64 | 1.0 | 0.0 |
| ConvBNBlock_2/BatchNorm_0/mean | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_2/BatchNorm_0/var | (64,) | 64 | 1.0 | 0.0 |
| ConvBNBlock_3/BatchNorm_0/mean | (64,) | 64 | 0.0 | 0.0 |
| ConvBNBlock_3/BatchNorm_0/var | (64,) | 64 | 1.0 | 0.0 |
+--------------------------------+-------+------+------+-----+
Total weights: 512
Initial compilation, which might take some time ...
Initial compilation completed.
Epoch Time Train_LR Train_Loss Train_SNR Eval_Loss Eval_SNR
---------------------------------------------------------------------
6 4.53e+01 0.001000 0.001960 13.19 0.000986 14.43
12 8.72e+01 0.001000 0.000939 14.33 0.001067 14.08
18 1.29e+02 0.001000 0.000875 14.63 0.001289 13.29
24 1.70e+02 0.001000 0.000838 14.82 0.000868 14.99
30 2.12e+02 0.001000 0.000816 14.93 0.000844 15.11
36 2.54e+02 0.001000 0.000804 15.00 0.001076 14.11
43 2.96e+02 0.001000 0.000797 15.04 0.000827 15.20
49 3.38e+02 0.001000 0.000792 15.07 0.001254 13.60
Evaluate on testing data.
[6]:
test_patches = 720
start_time = time()
fmap = sflax.FlaxMap(model, modvar)
output = fmap(test_ds["image"][:test_patches])
time_eval = time() - start_time
output = np.clip(output, a_min=0, a_max=1.0)
Evaluate trained model in terms of reconstruction time and data fidelity.
[7]:
snr_eval = metric.snr(test_ds["label"][:test_patches], output)
psnr_eval = metric.psnr(test_ds["label"][:test_patches], output)
print(
f"{'DnCNNNet training':18s}{'epochs:':2s}{train_conf['num_epochs']:>5d}"
f"{'':21s}{'time[s]:':10s}{trainer.train_time:>7.2f}"
)
print(
f"{'DnCNNNet testing':18s}{'SNR:':5s}{snr_eval:>5.2f}{' dB'}{'':3s}"
f"{'PSNR:':6s}{psnr_eval:>5.2f}{' dB'}{'':3s}{'time[s]:':10s}{time_eval:>7.2f}"
)
DnCNNNet training epochs: 50 time[s]: 343.96
DnCNNNet testing SNR: 15.34 dB PSNR: 27.73 dB time[s]: 2.20
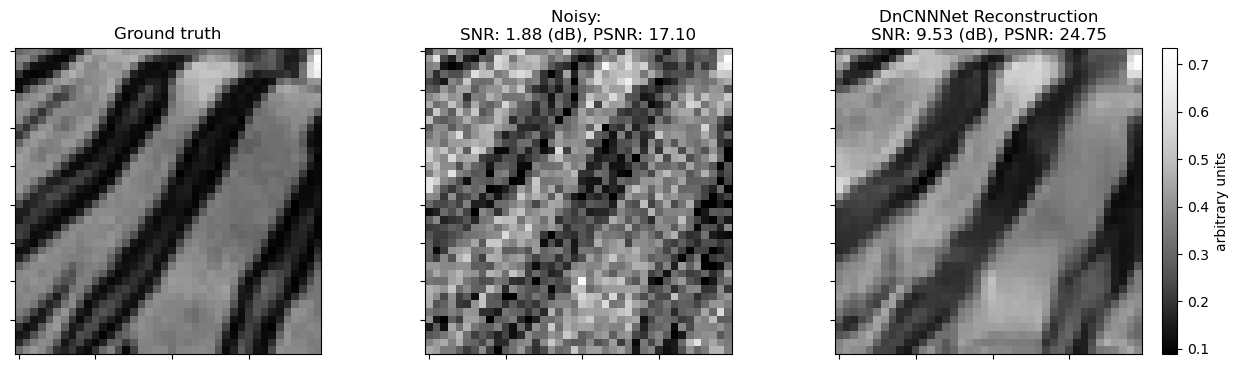
Plot comparison. Note that plots may display unidentifiable image fragments due to the small patch size.
[8]:
np.random.seed(123)
indx = np.random.randint(0, high=test_patches)
fig, ax = plot.subplots(nrows=1, ncols=3, figsize=(15, 5))
plot.imview(test_ds["label"][indx, ..., 0], title="Ground truth", cbar=None, fig=fig, ax=ax[0])
plot.imview(
test_ds["image"][indx, ..., 0],
title="Noisy: \nSNR: %.2f (dB), PSNR: %.2f"
% (
metric.snr(test_ds["label"][indx, ..., 0], test_ds["image"][indx, ..., 0]),
metric.psnr(test_ds["label"][indx, ..., 0], test_ds["image"][indx, ..., 0]),
),
cbar=None,
fig=fig,
ax=ax[1],
)
plot.imview(
output[indx, ..., 0],
title="DnCNNNet Reconstruction\nSNR: %.2f (dB), PSNR: %.2f"
% (
metric.snr(test_ds["label"][indx, ..., 0], output[indx, ..., 0]),
metric.psnr(test_ds["label"][indx, ..., 0], output[indx, ..., 0]),
),
fig=fig,
ax=ax[2],
)
divider = make_axes_locatable(ax[2])
cax = divider.append_axes("right", size="5%", pad=0.2)
fig.colorbar(ax[2].get_images()[0], cax=cax, label="arbitrary units")
fig.show()

Plot convergence statistics. Statistics are generated only if a training cycle was done (i.e. if not reading final epoch results from checkpoint).
[9]:
if stats_object is not None and len(stats_object.iterations) > 0:
hist = stats_object.history(transpose=True)
fig, ax = plot.subplots(nrows=1, ncols=2, figsize=(12, 5))
plot.plot(
np.vstack((hist.Train_Loss, hist.Eval_Loss)).T,
x=hist.Epoch,
ptyp="semilogy",
title="Loss function",
xlbl="Epoch",
ylbl="Loss value",
lgnd=("Train", "Test"),
fig=fig,
ax=ax[0],
)
plot.plot(
np.vstack((hist.Train_SNR, hist.Eval_SNR)).T,
x=hist.Epoch,
title="Metric",
xlbl="Epoch",
ylbl="SNR (dB)",
lgnd=("Train", "Test"),
fig=fig,
ax=ax[1],
)
fig.show()