PPP (with BM4D) Volume Deconvolution¶
This example demonstrates the solution of a 3D image deconvolution problem (involving recovering a 3D volume that has been convolved with a 3D kernel and corrupted by noise) using the ADMM Plug-and-Play Priors (PPP) algorithm [56], with the BM4D [41] denoiser.
[1]:
import numpy as np
import scico.numpy as snp
from scico import functional, linop, loss, metric, plot, random
from scico.examples import create_3d_foam_phantom, downsample_volume, tile_volume_slices
from scico.optimize.admm import ADMM, LinearSubproblemSolver
from scico.util import device_info
plot.config_notebook_plotting()
Create a ground truth image.
[2]:
np.random.seed(1234)
N = 128 # phantom size
Nx, Ny, Nz = N, N, N // 4
upsamp = 2
x_gt_hires = create_3d_foam_phantom((upsamp * Nz, upsamp * Ny, upsamp * Nx), N_sphere=100)
x_gt = downsample_volume(x_gt_hires, upsamp)
x_gt = snp.array(x_gt) # convert to jax array
Set up forward operator and test signal consisting of blurred signal with additive Gaussian noise.
[3]:
n = 5 # convolution kernel size
σ = 20.0 / 255 # noise level
psf = snp.ones((n, n, n)) / (n**3)
A = linop.Convolve(h=psf, input_shape=x_gt.shape)
Ax = A(x_gt) # blurred image
noise, key = random.randn(Ax.shape)
y = Ax + σ * noise
Set up ADMM solver.
[4]:
f = loss.SquaredL2Loss(y=y, A=A)
C = linop.Identity(x_gt.shape)
λ = 40.0 / 255 # BM4D regularization strength
g = λ * functional.BM4D()
ρ = 1.0 # ADMM penalty parameter
maxiter = 10 # number of ADMM iterations
solver = ADMM(
f=f,
g_list=[g],
C_list=[C],
rho_list=[ρ],
x0=A.T @ y,
maxiter=maxiter,
subproblem_solver=LinearSubproblemSolver(cg_kwargs={"tol": 1e-3, "maxiter": 100}),
itstat_options={"display": True},
)
Run the solver.
[5]:
print(f"Solving on {device_info()}\n")
x = solver.solve()
x = snp.clip(x, 0, 1)
hist = solver.itstat_object.history(transpose=True)
Solving on GPU (NVIDIA GeForce RTX 2080 Ti)
Iter Time Prml Rsdl Dual Rsdl CG It CG Res
------------------------------------------------------
0 3.16e+01 7.594e+00 2.584e+01 3 3.616e-04
1 6.01e+01 3.864e+00 1.773e+01 3 3.775e-04
2 8.68e+01 2.389e+00 1.264e+01 3 2.436e-04
3 1.10e+02 1.826e+00 9.431e+00 2 9.220e-04
4 1.34e+02 1.634e+00 7.319e+00 2 6.801e-04
5 1.59e+02 1.596e+00 5.925e+00 2 5.132e-04
6 1.81e+02 1.507e+00 4.923e+00 2 3.967e-04
7 2.01e+02 1.442e+00 4.189e+00 2 3.075e-04
8 2.20e+02 1.330e+00 3.614e+00 2 2.544e-04
9 2.39e+02 1.303e+00 3.201e+00 2 2.171e-04
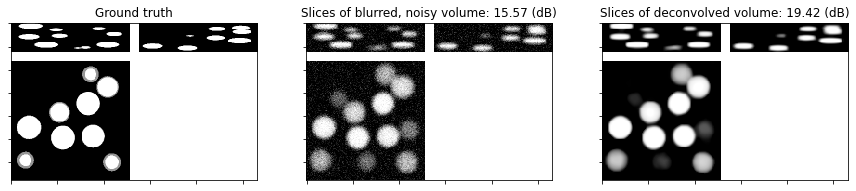
Show slices of the recovered 3D volume.
[6]:
show_id = Nz // 2
fig, ax = plot.subplots(nrows=1, ncols=3, figsize=(15, 5))
plot.imview(tile_volume_slices(x_gt), title="Ground truth", fig=fig, ax=ax[0])
nc = n // 2
yc = y[nc:-nc, nc:-nc, nc:-nc]
yc = snp.clip(yc, 0, 1)
plot.imview(
tile_volume_slices(yc),
title="Slices of blurred, noisy volume: %.2f (dB)" % metric.psnr(x_gt, yc),
fig=fig,
ax=ax[1],
)
plot.imview(
tile_volume_slices(x),
title="Slices of deconvolved volume: %.2f (dB)" % metric.psnr(x_gt, x),
fig=fig,
ax=ax[2],
)
fig.show()
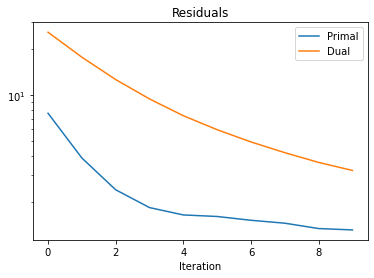
Plot convergence statistics.
[7]:
plot.plot(
snp.vstack((hist.Prml_Rsdl, hist.Dual_Rsdl)).T,
ptyp="semilogy",
title="Residuals",
xlbl="Iteration",
lgnd=("Primal", "Dual"),
)