Image Deconvolution with TV Regularization (Proximal ADMM Solver)¶
This example demonstrates the solution of an image deconvolution problem with isotropic total variation (TV) regularization
where \(C\) is a convolution operator, \(\mathbf{y}\) is the blurred image, \(D\) is a 2D finite difference operator, and \(\mathbf{x}\) is the deconvolved image.
In this example the problem is solved via proximal ADMM, while standard ADMM is used in a companion example.
[1]:
import komplot as kplt
from xdesign import SiemensStar, discrete_phantom
import scico.numpy as snp
import scico.random
from scico import functional, linop, loss, metric
from scico.optimize import ProximalADMM
from scico.util import device_info
kplt.config_notebook_plotting()
Create a ground truth image.
[2]:
phantom = SiemensStar(32)
N = 256 # image size
x_gt = snp.pad(discrete_phantom(phantom, N - 16), 8)
Set up the forward operator and create a test signal consisting of a blurred signal with additive Gaussian noise.
[3]:
n = 5 # convolution kernel size
σ = 20.0 / 255 # noise level
psf = snp.ones((n, n)) / (n * n)
C = linop.Convolve(h=psf, input_shape=x_gt.shape)
Cx = C(x_gt) # blurred image
noise, key = scico.random.randn(Cx.shape, seed=0)
y = Cx + σ * noise
Set up the problem to be solved. We want to minimize the functional
where \(C\) is the convolution operator and \(D\) is a finite difference operator. This problem can be expressed as
which can be written in the form of a standard ADMM problem
with
This is a more complex splitting than that used in the companion example, but it allows the use of a proximal ADMM solver in a way that avoids the need for the conjugate gradient sub-iterations used by the ADMM solver in the companion example.
[4]:
f = functional.ZeroFunctional()
g0 = loss.SquaredL2Loss(y=y)
λ = 2.0e-2 # ℓ2,1 norm regularization parameter
g1 = λ * functional.L21Norm()
g = functional.SeparableFunctional((g0, g1))
D = linop.FiniteDifference(input_shape=x_gt.shape, append=0)
A = linop.VerticalStack((C, D))
Set up a proximal ADMM solver object.
[5]:
ρ = 5.0e-2 # ADMM penalty parameter
maxiter = 50 # number of ADMM iterations
mu, nu = ProximalADMM.estimate_parameters(A)
solver = ProximalADMM(
f=f,
g=g,
A=A,
B=None,
rho=ρ,
mu=mu,
nu=nu,
x0=C.adj(y),
maxiter=maxiter,
itstat_options={"display": True, "period": 10},
)
Run the solver.
[6]:
print(f"Solving on {device_info()}\n")
x = solver.solve()
hist = solver.itstat_object.history(transpose=True)
Solving on GPU (NVIDIA GeForce RTX 2080 Ti)
Iter Time Objective Prml Rsdl Dual Rsdl
-----------------------------------------------
0 1.25e+00 1.161e+00 3.894e+01 1.308e+02
10 2.52e+00 1.783e+02 1.552e+01 3.489e+00
20 2.70e+00 2.145e+02 8.852e+00 2.538e+00
30 2.88e+00 2.496e+02 5.304e+00 1.220e+00
40 3.11e+00 2.787e+02 3.315e+00 7.807e-01
49 3.32e+00 2.936e+02 2.150e+00 5.076e-01
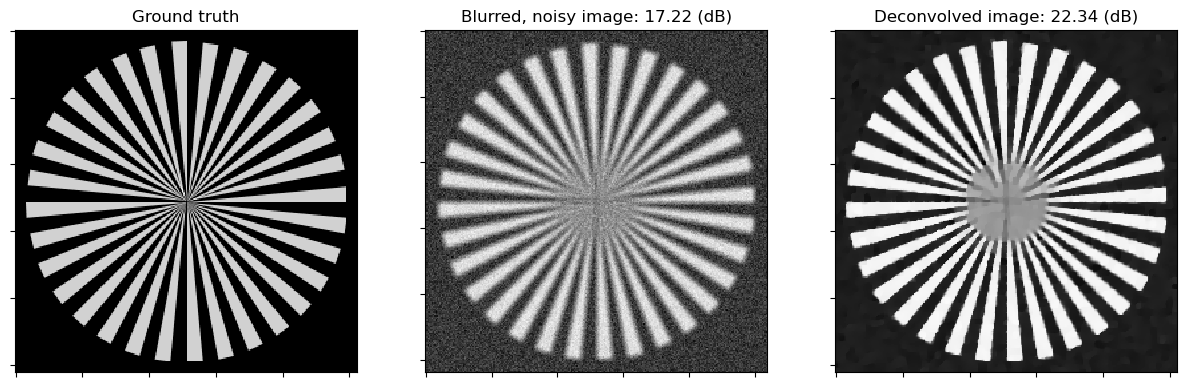
Show the recovered image.
[7]:
fig, ax = kplt.subplots(nrows=1, ncols=3, sharex=True, sharey=True, figsize=(15, 5))
kplt.imview(x_gt, cmap="Blues", title="Ground truth", ax=ax[0])
nc = n // 2
yc = y[nc:-nc, nc:-nc]
kplt.imview(
y, cmap="Blues", title="Blurred, noisy image: %.2f (dB)" % metric.psnr(x_gt, yc), ax=ax[1]
)
kplt.imview(
solver.x,
cmap="Blues",
title="Deconvolved image: %.2f (dB)" % metric.psnr(x_gt, solver.x),
ax=ax[2],
)
fig.show()
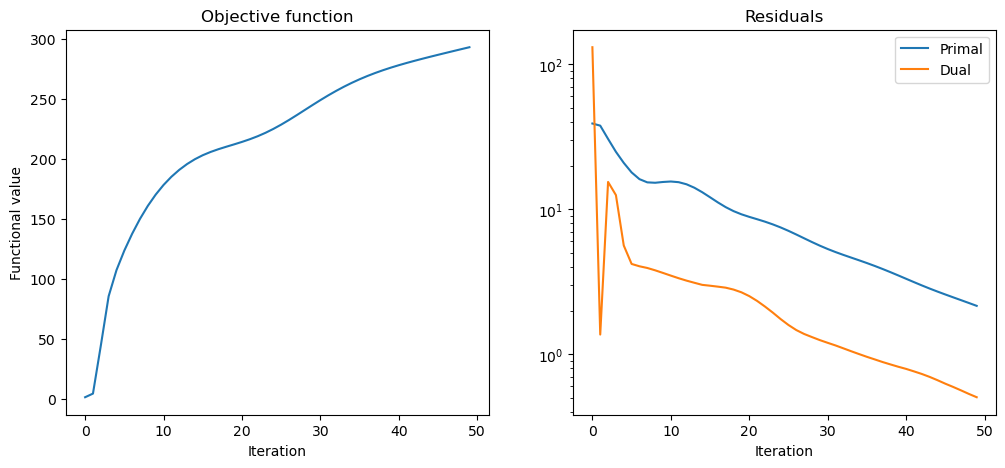
Plot convergence statistics.
[8]:
fig, ax = kplt.subplots(nrows=1, ncols=2, figsize=(12, 5))
kplt.plot(
hist.Objective,
title="Objective function",
xlabel="Iteration",
ylabel="Functional value",
ax=ax[0],
)
kplt.plot(
snp.array((hist.Prml_Rsdl, hist.Dual_Rsdl)).T,
ylog=True,
title="Residuals",
xlabel="Iteration",
legend=("Primal", "Dual"),
ax=ax[1],
)
fig.show()