TV-Regularized Abel Inversion¶
This example demonstrates a total variation (TV) regularized Abel inversion by solving the problem
\[\mathrm{argmin}_{\mathbf{x}} \; (1/2) \| \mathbf{y} - A \mathbf{x}
\|_2^2 + \lambda \| C \mathbf{x} \|_1 \;,\]
where \(A\) is the Abel projector (with an implementation based on a projector from PyAbel [25]), \(\mathbf{y}\) is the measured data, \(C\) is a 2D finite difference operator, and \(\mathbf{x}\) is the solution.
[1]:
import numpy as np
import komplot as kplt
import scico.numpy as snp
from scico import functional, linop, loss, metric
from scico.examples import create_circular_phantom
from scico.linop.xray.abel import AbelTransform
from scico.optimize.admm import ADMM, LinearSubproblemSolver
from scico.util import device_info
kplt.config_notebook_plotting()
Create a ground truth image.
[2]:
N = 256 # image size
x_gt = create_circular_phantom((N, N), [0.4 * N, 0.2 * N, 0.1 * N], [1, 0, 0.5])
Set up the forward operator and create a test measurement.
[3]:
A = AbelTransform(x_gt.shape)
y = A @ x_gt
np.random.seed(12345)
y = y + np.random.normal(size=y.shape).astype(np.float32)
Compute inverse Abel transform solution.
[4]:
x_inv = A.inverse(y)
Set up the problem to be solved. Anisotropic TV, which gives slightly better performance than isotropic TV for this problem, is used here.
[5]:
f = loss.SquaredL2Loss(y=y, A=A)
λ = 2.35e1 # ℓ1 norm regularization parameter
g = λ * functional.L1Norm() # Note the use of anisotropic TV
C = linop.FiniteDifference(input_shape=x_gt.shape)
Set up ADMM solver object.
[6]:
ρ = 1.03e2 # ADMM penalty parameter
maxiter = 100 # number of ADMM iterations
cg_tol = 1e-4 # CG relative tolerance
cg_maxiter = 25 # maximum CG iterations per ADMM iteration
solver = ADMM(
f=f,
g_list=[g],
C_list=[C],
rho_list=[ρ],
x0=snp.clip(x_inv, 0.0, 1.0),
maxiter=maxiter,
subproblem_solver=LinearSubproblemSolver(cg_kwargs={"tol": cg_tol, "maxiter": cg_maxiter}),
itstat_options={"display": True, "period": 10},
)
Run the solver.
[7]:
print(f"Solving on {device_info()}\n")
solver.solve()
x_tv = snp.clip(solver.x, 0.0, 1.0)
Solving on GPU (NVIDIA GeForce RTX 2080 Ti)
Iter Time Objective Prml Rsdl Dual Rsdl CG It CG Res
-----------------------------------------------------------------
0 2.31e+00 5.897e+04 3.531e+02 7.648e+03 17 9.734e-05
10 3.77e+00 5.973e+04 1.650e+01 6.834e+01 5 7.628e-05
20 3.94e+00 6.132e+04 8.719e+00 6.872e+00 0 8.422e-05
30 4.11e+00 6.182e+04 1.139e+01 3.056e+01 4 4.874e-05
40 4.27e+00 6.209e+04 5.933e+00 1.786e+01 4 7.998e-05
50 4.40e+00 6.224e+04 3.701e+00 2.907e+00 0 9.522e-05
60 4.56e+00 6.247e+04 8.009e+00 2.692e+01 3 4.132e-05
70 4.72e+00 6.259e+04 5.332e+00 4.006e+00 0 8.825e-05
80 4.86e+00 6.262e+04 3.140e+00 2.437e+00 0 9.594e-05
90 4.96e+00 6.269e+04 5.823e+00 3.170e+00 0 9.493e-05
99 5.06e+00 6.271e+04 2.199e+00 1.344e+00 0 7.553e-05
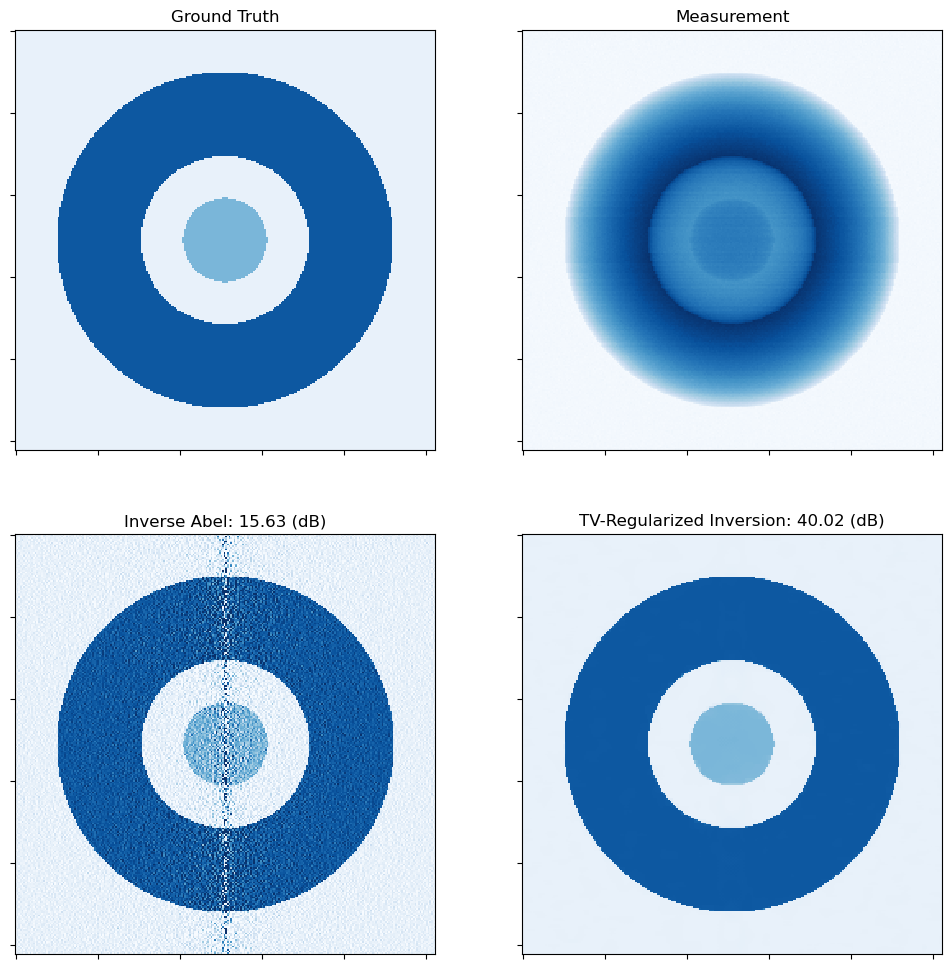
Show results.
[8]:
norm = kplt.colors.Normalize(vmin=-0.1, vmax=1.2)
fig, ax = kplt.subplots(nrows=2, ncols=2, figsize=(12, 12))
kplt.imview(x_gt, title="Ground Truth", cmap=kplt.cm.Blues, ax=ax[0, 0], norm=norm)
kplt.imview(y, title="Measurement", cmap=kplt.cm.Blues, ax=ax[0, 1])
kplt.imview(
x_inv,
title="Inverse Abel: %.2f (dB)" % metric.psnr(x_gt, x_inv),
cmap=kplt.cm.Blues,
ax=ax[1, 0],
norm=norm,
)
kplt.imview(
x_tv,
title="TV-Regularized Inversion: %.2f (dB)" % metric.psnr(x_gt, x_tv),
cmap=kplt.cm.Blues,
ax=ax[1, 1],
norm=norm,
)
fig.show()